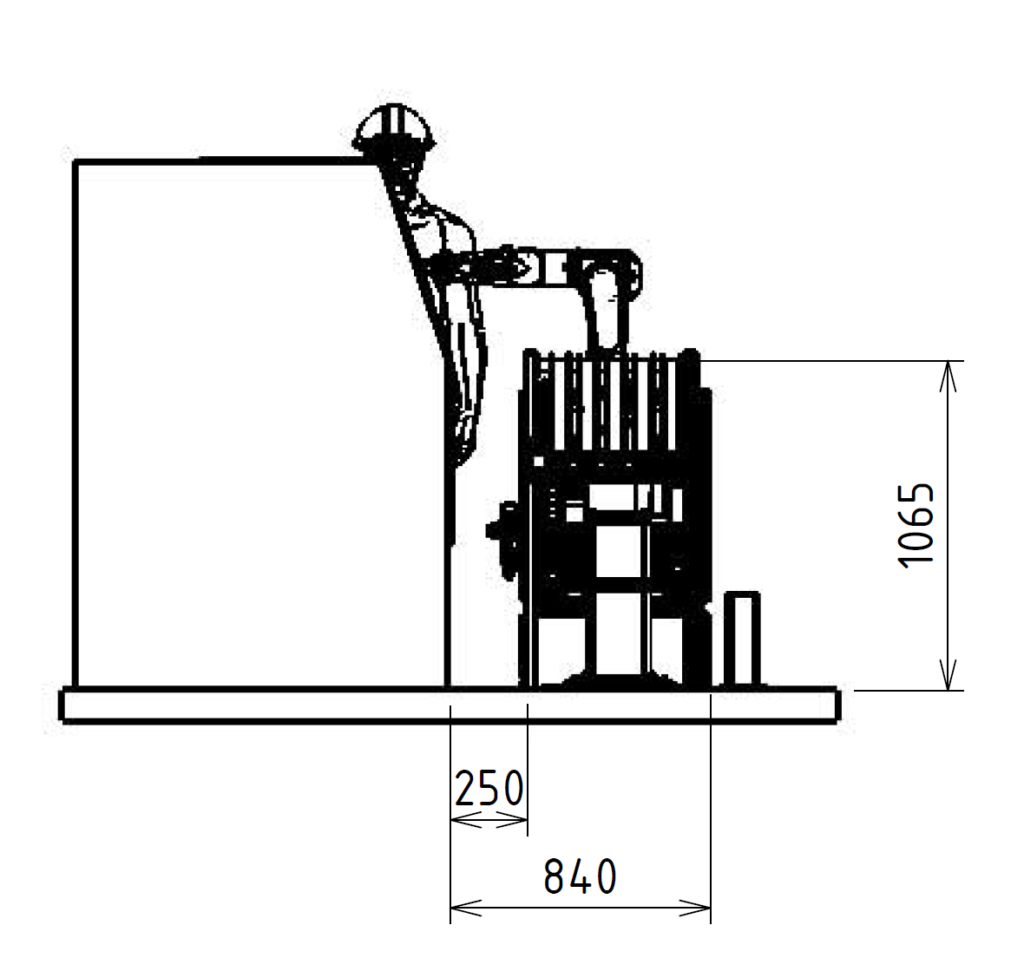
Czujnik siły / polerowanie, gratowanie
Sześcioosiowy czujnik siły, umieszczony na ramieniu robota, umożliwia ruch konturowy robota przy zachowaniu wyznaczonej siły nacisku na element.
Robot sterowany siłą przyczynia się do automatyzacji procesów, takich jak gratowanie obrobionych krawędzi części i polerowanie powierzchni części.